
 扫描关注微信
扫描关注微信



编者按:光伏排阵、光伏发电板、光伏板清洁机具、清维成本、转驳车、移动终端,理想光伏组件清洁方案的探索。
摘要:
光伏电站组件表面不洁会降低25-35%或更多的发电量是光伏行业的共识,人工清洗方法虽然曾经广泛采用,光伏531新政出台,补贴退坡、平价上网已是大势所趋,再加人工工资上涨,清洁成本已超出清洁后所增发电量的收入,现仅享受原补贴政策的光伏发电站继续延用。虽然现在国内外出现多种半自动和全自动光伏发电板清洁机械,遗憾的是清洁后增发电收入与清维成本之比均不理想,而且平原、丘陵、山坡、无水沙漠、水上、农用大棚各类型集中式光伏电站不能广泛适应,维护人力投入大,必须寻求一种清洗后增发电收入与清维成本之比大于80-90%以上的能广泛适应各类型光伏发电站的光伏电池板清洗方案,这是光伏行业亟待解决的重大课题。能即时最短距离清扫灰尘落地的光伏电池板清洁机具和轨道转驳充电车将更具实用意义。本文围绕配备光伏电池板清洁机具的远动终端控制的机器人和轨道转驳该机器人的充电车展开其试制、运行方式、清维成本三方面的研究工作。本文的主要研究工作包括:
(一)提出理想的光伏发电板清洁方案的技术要求。
(二)对清洁机器人的行走机构、清扫机具、24小时不间断供电的讨论。
(三)探讨光伏板清洁机器人的光伏排阵转移的转驳车、光伏板清洁机器人亏电电瓶的更换、能广泛适应各类型集中式光伏发电站的转驳车轨道、亏电电瓶在转驳车上的充电技术的应用。
(四)分析在清洗后较两周未清洗光伏板确保增发电25%的基础上清维成本与发电收入比≯1%的实现。
一种理想的光伏发电板清洁方案—— 包括清洗机器人+配套设施
1、理想的的光伏发电板清洁方案的技术要求:
1.1、清洗机器人具有清洗后增加发电量达到人工清洗效果的清洁机具;
1.2、清洗机器人长度3.4m时,重量不大于30kg;
1.3、能到达本发电站的任何光伏排运行;
1.4、连续清洗时间不小于24h,24h清洗面积不小于10万平方米(10mw);
1.5、除适应平地发电站外还适应丘陵、沙漠、水上、农用大棚发电站;
1.6、除远动监控外,均全自动独立运行;
1.7、为便于运输,清洗机器人为模块组装结构能在无水的沙漠地区干洗、在有雨水的地区依靠雨水清洗;
1.8、为减轻对光伏板减轻压强,机器人的行走轮为履带式行走轮。
2、理想的光伏发电板清洁方案的系统设有:
光伏发电板清扫机器人、光伏发电板清扫机器人转驳车轨道、电源转换箱、直流低于供电线路、清扫机器人转驳车。
2.1、光伏清扫机器人
由行走单元和清扫机具组成,匍匐于光伏板从光伏排阵的一端向另一端行走而清扫光伏板,≦10MW光伏发电站配置1台。
2.1.1、机器人的行走单元,由至少三根长度≧光伏排阵横向寛的横梁平行贯穿并刚性固定若干其
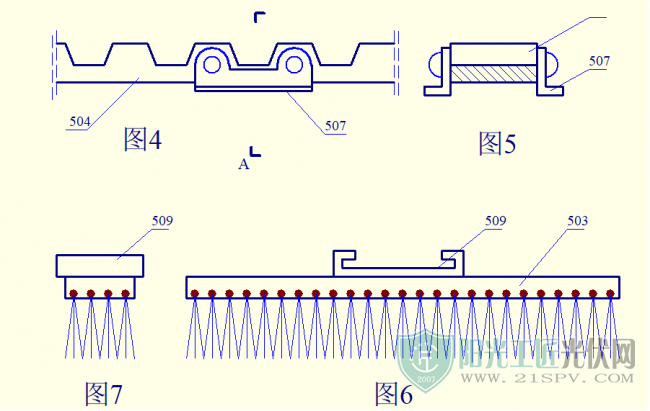
结构形状相同的安装了履带行走轮和跨越轮的行走模块,该行走模块至少是3块,分布于光伏排阵的光伏板横向的上、中、下位置,行走电机直接或间接驱动传动轴,该轴同时驱动各行走板的为同步轮的驱动轮,并由其同步带带动各行走模块的以所述同步带为履带的双联所述履带行走轮,钩挂行走板钩挂于光伏排阵的上边框或其支架上边口边条,该钩挂板与所述行走单元板的结构、形状类同,其传动轴竖直向上与水平传动轴交接处用直角传动器连接。
2.1.1.a、所述行走模块除设有一对双联所述履带行走轮、左右跨越轮外还设有1传动轮(3-1)、若干压带轮,其下边中央设呈高200*寛220mm左右的∏形缺口,供所述节链式清洁组件可无阻碍通行,在该缺口两边安装为双联所述履带行走轮,所述传动轮由所述行走电机驱动的所述传动轴带动的第一同步带传动,3块或以上行走模块中至少有一块左右边口的朝下测落空、朝外测转驳车的传感器A和B。
2.1.1.b、所述横梁相对断面与所述行走模块利用紧固件在用户现场紧固。
2.1.2、清扫机具
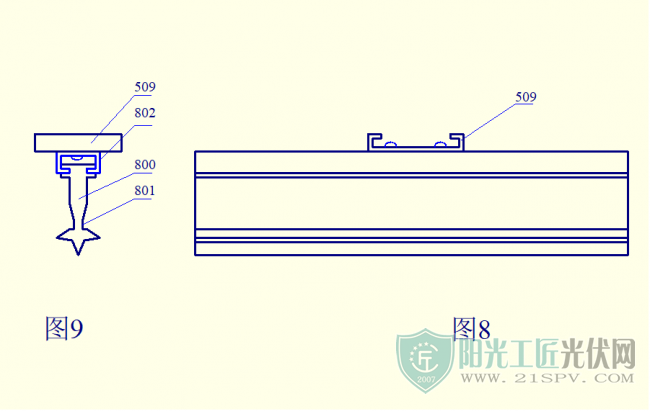
2.1.2.a、包括由被置于光伏阵列左右两边的两平行的同步带轮轴张紧的同步带,在该同步带按200mm左右间距垂直安装长度为200mm左右高3-5cm的清扫元件,所述同步带轮轴之一被清扫电机带动,其下半环的清扫元件的刷刮端过盈接触光伏板表面,将光伏板灰尘刮或刷向光伏板边外处,在该处设有顺时针旋转与其过盈接触的清垢辊刷将其所沾灰尘刷落于地,对所述同步带环下半边所述清扫元件被骑跨于同步带为∏形截面的压条施于适当的压力。
2.1.2.b、清扫机具的所述同步带按200mm间距如弯板链条那样在相邻两凸起打孔穿销安装弯板为所述清扫元件安装接口。
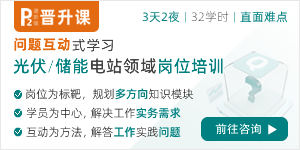
2.1.2.c、所述清扫元件,其长为220mm左右高3-5cm,设有两种,1是30mm左右寛的毛刷板;2是2-3mm厚从侧面看下端向左右和下是3个锐角,向上呈细颈与橡胶本体连接的刮板,其基部两边设有突缘卡入带有相应纵向卡槽的卡包条,顶部设有快卸快装卡头,该两种清扫元件间隔安装,或根据有水无水地区选择安装。
2.1.3、工业远程测控终端,手机监测控制行走和清扫两电机的“开”、“关”或遇下雨自动运行清洗一遍关机。
3、转驳车轨道
与本光伏发电站所有光伏排阵两端端头衔接(双轨),根据现场条件可选用地轨或打桩高架轨或水泥沥青道;如果是在光伏排阵单端连接(单轨),可节约轨道投资,但降低了工作效率。
4、转驳车
4.1、用途:供清扫机器人排阵转移及机器人电瓶轮换充电。
4.2、数量:10mw光伏发电站配置2辆/双轨。
4.3、功能:转驳车可与光伏板清洁机器人自动对接转驳,对若干机器人用电瓶充电,并在与机器人对接时自动更换亏电电瓶,该转驳车可将所述光伏板清洁机器人转移至近旁的光伏排阵端头并对接转移,除受远动终端测控外依靠有轨或无轨车道中标记被所述转驳车传感器识别而实现无人驾驶转移。
4.4、(采用了中国专利201811065013.1的“光伏清洁机器人排阵转移及充电转驳车”)
4.5、爬坡最大角度-≮20度。
5、电源转换箱
供电转换小屋建于发电场近旁,由交流市电转换成符合电瓶充电电压的直流电源房,转驳车的驱动和充电电源是通过沿轨道的架空滑触线、集电器连接至转驳车。
6、远程监控系统
7、清洁系统的使用方法:
1) 平时,所述机器人在第一转驳车内待机.
2) 一旦接到工业远程测控系统指令,即启动行走电机驱动机器人脱离第一转驳车走上光伏排阵始端.
3) 向末端行进的同时清扫电机连续运行,不断地将光伏板灰尘刷或刮至边框外落地.
4) 行进至光伏排阵末端,如果光伏排阵是两边设有转驳车车道,即与第二转驳车自动对接,并走上该转驳车,并将机器人移与下一光伏排阵对接,在下一光伏排从头向尾清扫,以此类推。
(如果光伏排阵是单边轨道,行进至光伏排阵末端,则立即在原光伏排阵返回至起始端上转驳车而自动转移至下一光伏排阵清扫,以此类推.)
5) 除工业远程测控系统指令外直至转驳车车道道所有被衔接的光伏排清扫完成便自动停机。
6) 清洗机器人的若干周转电瓶在转驳车上充电,亏电对接时自动更换。 这样机器人载用电瓶容量就可降低至只需要够一排或两排光伏排阵所需要的电量而降低机器人电瓶重量。
7) 另外所述转驳车依靠有轨或无轨车道中标记被所述转驳车传感器识别而实现无人驾驶转移。
8) 无水沙漠地区-因是无机质灰尘,容易掸落,采用干刷;有雨水地区灰尘难掸落,乘下雨光伏板淋雨或潮湿清扫机器人24小时连续工作将发电站光伏板全部清洗一遍。
8、投入:
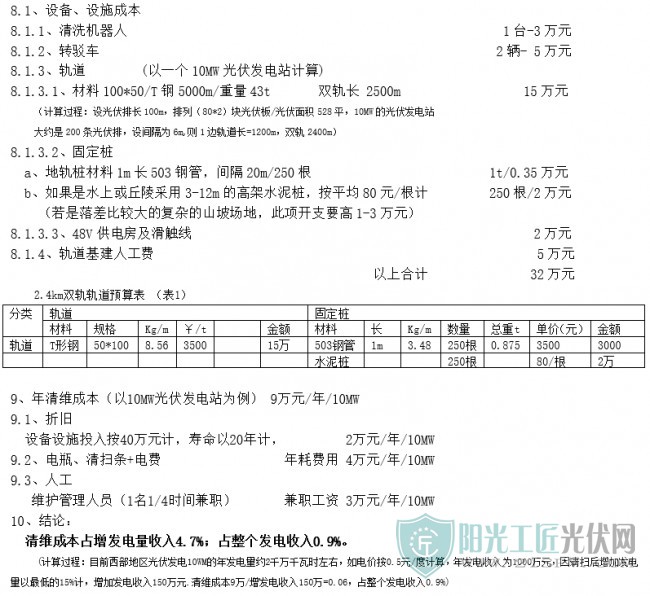
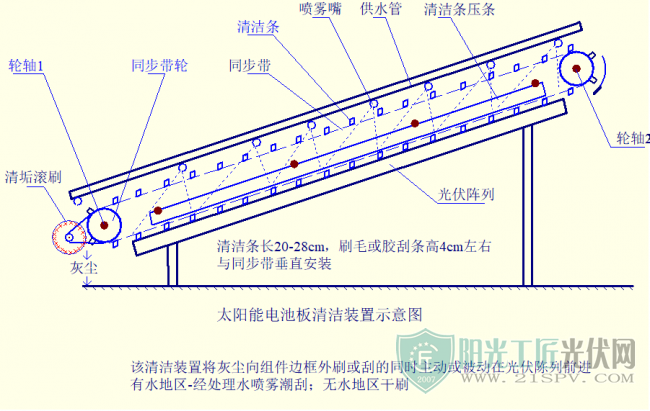

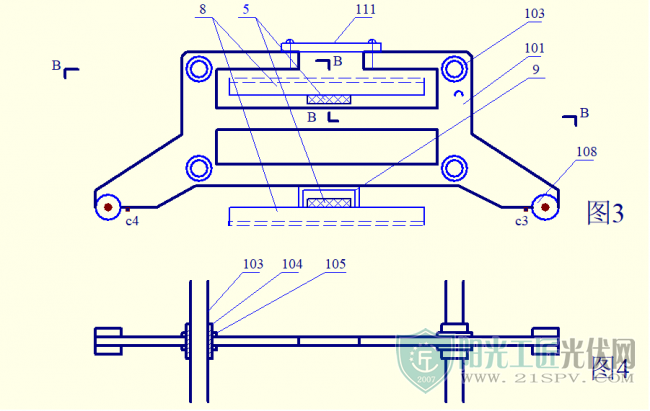
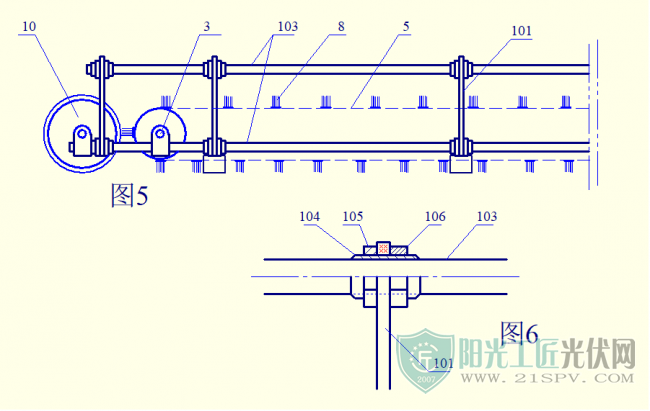
图6-清洁装置机架的安装版与金属管的紧固结构示意图;
谢谢! 笔者:杨景华 181****9928(请联系小编代为联系,电话:15995027646(微信同号))



 宁德时代吴凯...
宁德时代吴凯... 天合光能陈奕...
天合光能陈奕... 刘岩: 追光行...
刘岩: 追光行... 黄震院士:大...
黄震院士:大...